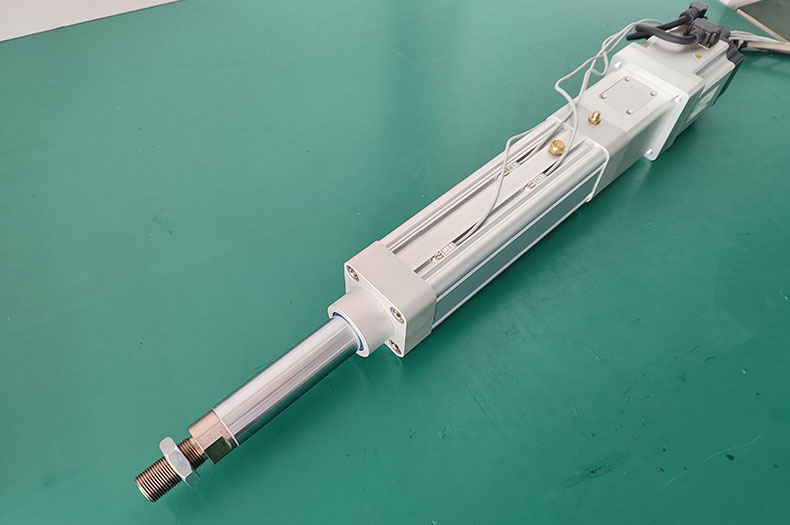
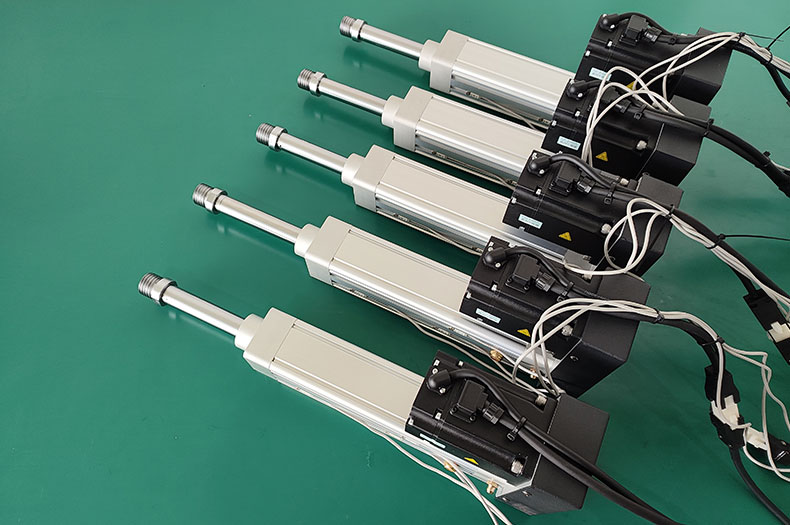
22年专注于伺服压装机、伺服电动缸、直线模组及智能装备研发生产
全国咨询热线:135 0921 9756









 东莞市铭辉自动化设备有限公司
东莞市铭辉自动化设备有限公司 135 0921 9756(童工)
135 0921 9756(童工) 0769-8352 0041/137 1233 6029
0769-8352 0041/137 1233 6029 2375699435
2375699435 mhauto@163.com
mhauto@163.com 东莞市中堂镇斗朗工业区华迅科技园8栋403号厂房
东莞市中堂镇斗朗工业区华迅科技园8栋403号厂房